
纳米位移台长期闲置保养流程与重启精度校准步骤
不少配备精密加工、微观检测设备的企业存在阶段性停产、项目暂停情况,纳米位移台会长达数月静置在真空腔体或操作台内,长期闲置不做防护保养,再次开机使用时极易出现运行卡顿、定位失准、传动干涩等一系列故障,一套完整的闲置封存与重启校准流程,能够有效保护内部精密传动结构,避免无谓损耗。
长期静置带来的设备损...

真空纳米位移台线缆布局规范与信号干扰解决措施
纳米位移台依靠配套控制线缆传输驱动与定位反馈信号,在扫描电镜、光刻设备真空腔内部安装使用时,线缆排布不合理极易造成信号失真、台面抖动、定位数值跳变等问题,很多设备精度异常排查时都会忽略线缆配套与布线规范,进而长期影响精密对位工作。
位移台专用信号线包含屏蔽层、接地端子等防护结构,若替换成普通无屏蔽...

纳米位移台电磁干扰引发信号波动与屏蔽防护措施
纳米位移台依靠电信号传输运动指令,周边复杂电气环境容易产生电磁干扰,直接造成指令响应异常、台面抖动、定位数值波动,干扰精密调试作业正常推进,很多故障排查时容易忽略电磁环境这一隐性因素。
设备周边大功率泵体、电机、高压检测仪器运行时,会持续产生杂散电磁场,干扰位移台信号传输线路,出现指令下发后台面小...

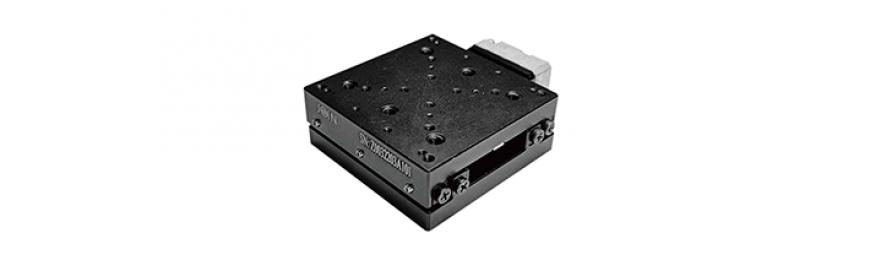
纳米位移台负载失衡带来的精度损耗与规范装夹操作要点
纳米位移台依靠精密传动结构实现微量精准移动,在各类真空检测、光学调试、微加工设备中作为核心承载部件使用,台面承载重物时受力状态会直接影响长期定位精度,负载失衡是日常使用中容易忽略的损耗诱因。
放置工件时重心单侧偏移、多层物料堆叠倾斜,会让台面长期承受不对称作用力,传动结构内部间隙发生细微变化,多次...
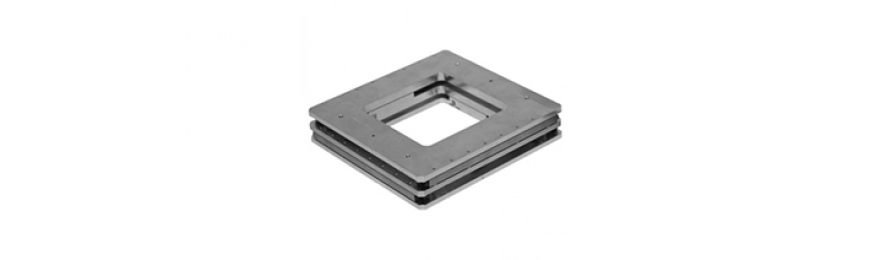
纳米位移台真空腔体使用注意事项与运行阻力异常处理办法
纳米位移台大量配套各类真空腔体设备使用,腔体内部密闭无空气缓冲,运行环境和普通常压环境存在明显区别,一旦使用方式不当,很容易出现运动阻滞、定位不稳等问题,直接影响腔体内精密对位作业效果。
市面上适配真空环境的位移台和普通常温常压款内部防护结构、表层处理工艺完全不同,普通型号内部填充的防护介质在负压...
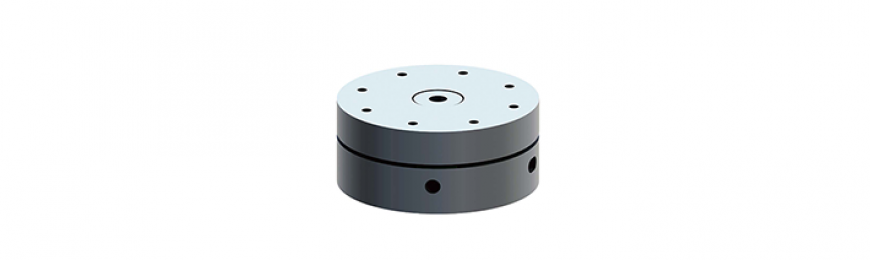
纳米位移台控制系统响应迟缓、动作滞后的诱因与调节养护方案
纳米位移台依靠配套控制系统下发运动指令完成微量移动,实操中经常出现指令下发后台面动作延迟、启停反应慢、连续多步动作衔接不流畅等现象,拖慢整体精密调试节奏,很多操作人员会误以为是硬件损坏,实际多为调试与养护不到位造成。
不同结构类型的位移台,和控制系统的匹配逻辑存在区别,部分机型对控制信号传输环境、...